Das Weltkoordinatensystem ist das wichtigste Koordinatensystem eines Roboters und in diesem Beitrag efährst du, was es ist, warum es so wichtig ist und wie der Roboter seine Koordinaten berechnet.
Ein Koordinatensystem braucht der Roboter, um zu wissen, wo und in welcher Position er sich gerade befindet. Es gibt verschiedene Koordinatensysteme, die jeweils für unterschiedliche Zwecke benötigt werden, und alle haben gemeinsam, dass sie mit drei Richtungen definiert sind: X, Y und Z.
X ist nach vorne und hinten, Y ist links und rechts, und Z ist oben und unten.
Der Ursprung des Weltkoordinatensystems befindet sich hierbei in der Basis des Roboters, also sozusagen in seinem Sockel. Das ist die Mitte der Achse 1, und hier befindet sich der Nullpunkt, also X:0, Y:0 und Z:0.
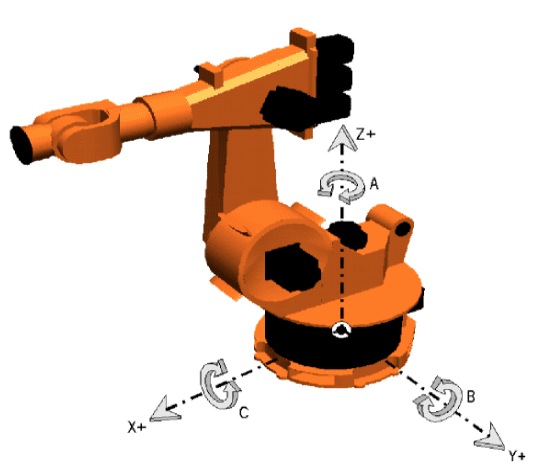
Die Koordinaten geben dann die Position der Mitte der Achse 6 an. Wenn ich also 1000 mm nach vorne und 1000 mm nach oben fahre, befände sich die Mitte der Achse 6 bei: X:1000, Y:0 und Z:1000.
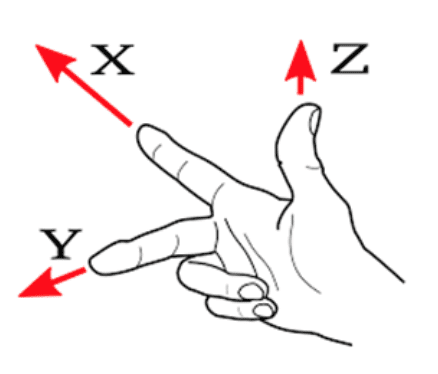
Wer Probleme hat, sich zu merken, ob X oder Y nach vorne/rechts geht, dem hilft die Rechte-Hand-Regel:
Nimm deine rechte Hand, der Zeigefinger zeigt nach vorne, der Daumen nach oben und der Mittelfinger nach links. Als kleine Eselsbrücke kannst du dir denken, dass aus deinem Zeigefinger ein Strahl herausschießt, der ein X auf die Fläche vor dir markiert. Damit weißt du: X ist nach vorne.
Das Weltkoordinatensystem ist sehr hilfreich, wenn du nicht weißt, wo der Roboter mit seinen Achsen steht. Wenn du zum Beispiel deinen Roboter aus einem Crash befreien willst, dann wird es vielleicht schwierig sein, das in Einzelachsen zu tun, da du nicht weißt, an welcher Position welche Achse steht. Beim Weltkoordinatensystem weißt du immer, wie du nach oben, unten, links, rechts, hinten, vorne fahren kannst, das macht es einfacher, in die richtige Richtung zu fahren.
Wenn du einen Punkt speicherst, dann speichert der Roboter nicht nur die Koordinate, sondern auch in welcher Orientierung das Werkzeug steht.
Jetzt brauchen wir aber natürlich meistens nicht die Mitte der Achse 6, denn ohne Werkzeug nützt uns ein Roboter nicht viel.
Weltkoordinatensystem und Tool Center Point
Wenn du deinen Tool-Center Point (TCP) berechnet hast, also die Mitte deines Werkzeuges (Blogbeitrag folgt, schau in der Zwischenzeit gerne dieses Video an), dann kannst du im Bewegen-Fenster auswählen, ob der Roboter mit t0 (Mitte von Achse 6) oder tWerkzeug (TCP/Mitte des Werkzeuges) rechnen soll. Wenn du tWerkzeug auswählst, zeigt er nicht den Standort von der Mitte der Achse 6 in Bezug zum Ursprung an, sondern den Standort des TCPs in Bezug zum Ursprung. Dementsprechend speichert er dann auch die Koordinaten.
In diesem Video findest du auch nochmal eine Erklärung zum Thema Koordinatensysteme inklusive Demonstration am Roboter:
Du möchtest Roboterbediener werden? Dann schau doch mal in unseren Kurs Certified Operator for KUKA Robots rein, damit wirst du zum zertifizierten Bediener bequem von zuhause aus. Du erfährst alles, was du über Roboterbedienung wissen musst, und erlernst sogar erste Programmierkenntnisse. Mehr Informationen findest du hier.